
Helyzetjelentés a robotok világából
A robotika világa a műszaki tudományok kifejezetten látványos szegmense. Időről-időre láthatunk a legfőbb hírportálokon ámulatba ejtő gépeket, amelyek újabb és újabb kunsztokra képesek. Az elmúlt hetekben különösen sok ilyen videó látott napvilágot, így csokorba szedtük őket, és kicsit utánanéztünk, hogy melyik mitől is különleges.
Amikor előkerül egy robot újabb trükkjét bemutató videó, akkor hajlamosak vagyunk olyan szófordulatokkal élni, hogy az „XY berendezés újabb mutatványt tanult meg”. Ez persze tágan értelmezve a fogalmat igaz, viszont fontos szem előtt tartani, hogy nem minden esetben beszélhetünk a szó klasszikus értelmében vett tanulásról. Különbséget kell tennünk azon gépek között, amelyek egy előre legyártott parancssor szerint, egy algoritmusnak engedelmeskedve hajtanak végre bizonyos feladatokat – menj el az x pontba, emeld fel a jobb első lábad y cm magasra, stb. –, illet azok között, amelyek - lazán fogalmazva - utasításként csak a végrehajtandó célt kapják meg, és bizonyos keretek közt saját maguk „tanulják meg” az oda vezető utat (természetesen ez is agy algoritmus szerint történik).
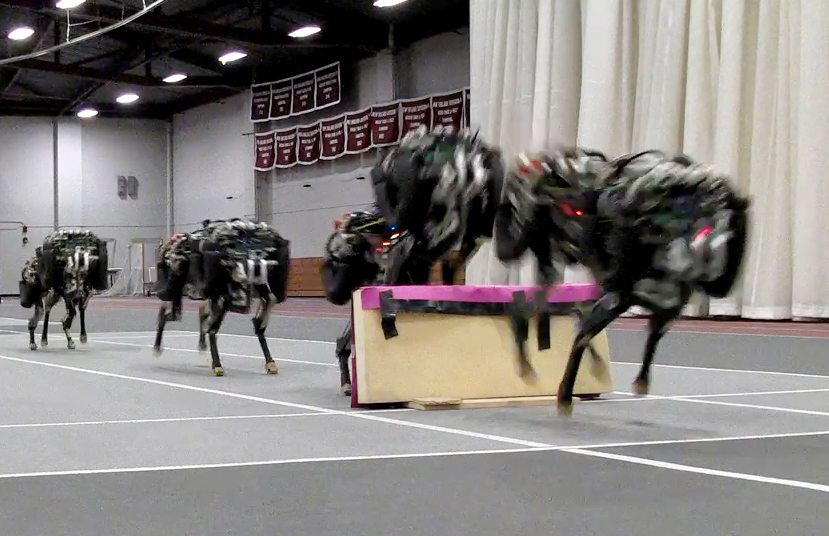
A terítékre kerülő robotok sorában első az MIT robotgepárdja, amely visszatérő vendég a hírportálokon.
Kétségkívül ez a leglátványosabb berendezés a jelenlegi bejegyzésben bemutatásra kerülők közül, viszont „gondolkodás” szempontjából talán ez mondható a legkevésbé fejlettnek. A gép egy lézeres távolságmérő segítségével észleli az útjába kerülő akadályt, felméri annak paramétereit, majd ennek tükrében egy gátfutóhoz teljesen hasonló módon optimalizálja a lépéshosszait, hogy jó ütemben érkezzen az ugráshoz. Itt a számítások egy előre meghatározott algoritmus szerint, determinisztikus módon történnek. Az eredmény irányítástechnikai szempontból lenyűgöző: a gépnek a videó tanúsága szerint meglehetősen kevés tere és ideje van a számítások elvégzésére, ráadásul igen nehéz körülmények közt kell megőriznie egyensúlyát, ami önmagában véve sem egyszerű feladat. Azt hiszem nem tévedünk nagyot, ha azt mondjuk: a futószalagos pályán bizony néhányan elesnénk néha...
4 láb után az evolúciót követve emelkedjünk két lábra: következik az Oregoni Egyetem két lábon járó gépe, az ATRIA névre hallgató berendezés.
A felvételeken a robotot egy biztonsági vázzal kísérik, ugyanis néha még meg-megbotlik, de maga a váz alapesetben nem segít a gépnek az egyensúlya megőrzésében. Ez a gép egyrészt az egyensúlyozó képessége miatt érdekes, másrészt – és ez a fontosabb itt – a lábak működtetésének mechanizmusa okán. A lábak a természet megoldásait modellezik: a rugalmas inakat és izmokat. Az élőlények ha megkezdenek egy lépést, akkor a testükbe épített rugalmasság miatt könnyedén lendülnek tova a következőre. Ez a robotok esetében azt jelenti, hogy a rugalmasságnak köszönhetően jóval energiatakarékosabbak, így kisebb akkumulátor is elegendő működtetésükhöz. A projekt a gepárdhoz hasonlóan a DARPA támogatásával halad előre, az eredmények a kutatók reményei szerint mozgáskorlátozottaknak nyújthatnak majd segítséget. (További videók itt érhetőek el.)
Tegyünk egy lépést most a tanulás világa felé: a következő gép Franciaországból érkezik és az INRIA kutatásainak köszönheti létét. A fejlesztők ebben az esetben arra a helyzetre kerestek megoldást, ha a robot valamilyen sérülés eredményeként nem tudja hatékonyan ellátni feladatát, mert az előre beprogramozott mozgás nem kivitelezhető a továbbiakban a meghibásodás eredményeként. Az alábbi videón az látható, amint ez a 6 lábú jószág egyik végtagjának elvesztése után néhány perc alatt megtanul tovabicegni:
Miért lehet fontos ez? Képzeljünk el egy olyan berendezést, amely például egy olyan helyen végez el valamilyen mentési feladatot, ahol „gazdái” probléma esetén nem tudnak a segítségére sietni, mondjuk egy meghibásodott atomreaktor belsejében. Vagy egy hétköznapibb szituációt véve: vegyünk egy önműködő járművet, amely meghibásodása után az autópálya közepén ragad. Ilyenkor nagyon jól jönne, ha a gép alkalmazkodni tudna az új, hibás állapotához, és megoldást találna arra, hogy el tudja hagyni a veszélyzónát, vagy vissza tudjon jutni üzemeltetőihez.
A gép tehát alkalmazkodik a megváltozott körülményekhez, de még ebben a helyzetben sincs arról szó, hogy teljesen szabadon „tanulna”. A fejlesztők előre beprogramoztak 13000 mozgásformát. A sérült robot észlelve, hogy nem megfelelően halad céljai felé, ezen könyvtárból választ ki egy olyan megoldást, amivel továbbra is el tudja érni kijelölt célját.
Végére maradt a látszólag legkevésbé látványos videó, amely azonban a felszín alatt igazán bámulatos fejlesztéséket rejt. Íme BRETT, a UC-Berkeley teremtménye:
A robot tulajdonképpen semmi olyat nem csinál, amit egy nyugdíjazás előtt álló ipari robot ne tudna megtenni sokkal gyorsabban és ügyesebben már több mint egy évtizede. BRETT különlegességét az adja, hogy említett kollégáival szemben az ő mozdulatai nincsenek előre beprogramozva. Míg egy ipari robot minden rezdülése előre meghatározott koordináták szerint történik, addig BRETT ténylegesen megtanulja, hogy miként is végezheti el az adott feladatot. Ez azért fontos előrelépés, mert amíg egy ipari robot egy fix környezetben tevékenykedik - mindig pontosan tudja, hogy hol kell lennie a következő csavarnak, a következő megfogandó alkatrésznek -, addig egy emberekkel közvetlenebb kapcsolatot ápoló, a hétköznapi, változó környezetben működő berendezésnek képesnek kell lennie alkalmazkodnia a megváltozott viszonyokhoz.
A videón BRETT tétova próbálkozásai olyan benyomást keltenek, mintha egy csecsemő először venné kézbe az adott elemeket. Meglepő talán, de majdnem pont erről van szó! BRETT mozdulatai nincsenek előre megírva, csak azt tudja, hogy mi az elvégzendő feladat. Például: illessz össze két alkatrészt. A gép természetesen nem tud értelmezni egy szöveges utasítást - ez lehet majd a következő lépés -, így egy algoritmus segítségével definiálni kell, hogy mikor is tekinthetjük a két alkatrészt összeillesztettnek. Ezt követően a robot elkezd próbálkozni. Szenzorai segítségével érzékeli (jelen esetben vizuálisan), hogy milyen is a végeredmény, és azt összehasonlítja az előírt céllal. Attól függően, hogy mennyire jutott közel a megoldáshoz, „megveregeti saját vállát”, ahogy egy gondos szülő biztatóan megsimogatná csemetéje buksiját egy sikeres próbálkozás után, és elraktározza, hogy az adott megoldás jobb volt-e az előzőekhez képest. Idővel a robot „rájön”, hogy miként érheti el az előre megadott célt, minek hatására részesül a legnagyobb dicséretben, és elsajátítja a feladat megoldásához szükséges lépéseket.
Ahogy ebből a néhány példából is látható, a robotok egyre több olyan képességre tesznek szert, amelynek köszönhetően folyamatosan bővülhet azon feladatok köre, melyeket el tudnak végezni. A tanulásra képes algoritmusok segítségével sokkal rugalmasabban tudnak alkalmazkodni a környezetükhöz, és ezáltal az emberekkel való interakciójuk is egyre könnyebbé válhat. Érdeklődve várjuk a további fejleményeket!
---------------------------------------------------
(Ha a kedves olvasó semmiképpen nem szeretne lemaradni a Facebook oldal frissítéseiről sem, akkor látogasson el az oldalra, és a fejlécben található „Tetszik” ikonon található kis nyíl segítségével megnyitható legördülő menüben kattintson az „Értesítéseket kérek” opcióra.)




