A sebészeti robotok evolúciója

 A 21. század egyik legnagyobb horderejű változását a robottechnika elképesztő fejlődése jelenti. Elektromos eszközeink bizonyos területeken kiváltják az emberi munkaerőt, másokon hasznos munkatársakká avanzsálnak, amelyekkel meg kell tanulnunk együttműködni, egy nyelvet beszélni. A legérdekesebbek talán azok az esetek, amikor nem önálló entitásként állnak be mellénk - vagy éppen a helyünkre - ezek a berendezések, hanem saját érzékszerveinket felerősítve, rövid kardunkat szikénket megtoldva egy lépéssel. Éppen ez történik a sebészetben: a mára már rutinszerűen használt Da Vinci berendezés nem csak új lehetőségeket biztosít a műtétet végző orvos számára, de a pácienseket is megkíméli a méretes hegektől és vágásoktól. Lássuk hogyan!
A 21. század egyik legnagyobb horderejű változását a robottechnika elképesztő fejlődése jelenti. Elektromos eszközeink bizonyos területeken kiváltják az emberi munkaerőt, másokon hasznos munkatársakká avanzsálnak, amelyekkel meg kell tanulnunk együttműködni, egy nyelvet beszélni. A legérdekesebbek talán azok az esetek, amikor nem önálló entitásként állnak be mellénk - vagy éppen a helyünkre - ezek a berendezések, hanem saját érzékszerveinket felerősítve, rövid kardunkat szikénket megtoldva egy lépéssel. Éppen ez történik a sebészetben: a mára már rutinszerűen használt Da Vinci berendezés nem csak új lehetőségeket biztosít a műtétet végző orvos számára, de a pácienseket is megkíméli a méretes hegektől és vágásoktól. Lássuk hogyan!
Egy népi szólás szerint „ami bent van, azt a sebész ki akarja venni, ami kilóg, azt le akarja vágni”. Ez persze költői túlzás, de a sebészet szó hallatán azért a legtöbben olyan eszközökre és fogalmakra asszociálunk, mint varrás, szike, vágás, lelki szemeink előtt pedig több centiméteres, öltések mintájával szegélyezett hegek jelennek meg. A technika fejlődésének köszönhetően ezek a masszív beavatkozásról árulkodó nyomok azonban egyre rövidülnek, bizonyos műtétek esetében gyakorlatilag egyik dimenziójukat is elveszítik: ponttá zsugorodnak.
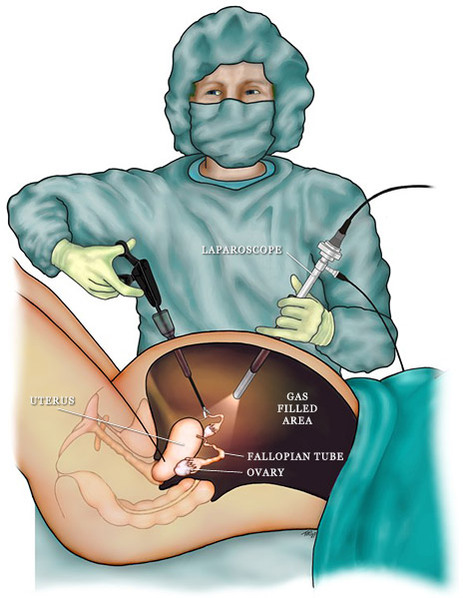 Mindezt a laparoszkópiás eljárás tette lehetővé. Ennek lényege – amint azt az ábra is mutatja –, hogy a hasfalat nem kell hosszan felvágni, elég csak két kis bemetszést ejteni azon. Ezeken keresztül a hasüreget széndioxiddal fújják fel, majd a kis nyílásokon átjuttatott karok segítségével végzik el a műtétet. Arról, hogy az orvos lássa is azt, amit csinál, a bevezetett száloptikás kamerák gondoskodnak. A minimális beavatkozásnak hála csökken a kórházban töltendő idő, a fertőzések lehetősége, a műtét utáni fájdalom, a beteg gyorsabban visszatérhet a hétköznapi rutinjához. Az elvégezhető operációk tárháza ugyan korlátozott, de így is bőséges: sérv, epehólyag eltávolítás, vastagbéltumor eltávolítás, vakbélműtét, stb.
Mindezt a laparoszkópiás eljárás tette lehetővé. Ennek lényege – amint azt az ábra is mutatja –, hogy a hasfalat nem kell hosszan felvágni, elég csak két kis bemetszést ejteni azon. Ezeken keresztül a hasüreget széndioxiddal fújják fel, majd a kis nyílásokon átjuttatott karok segítségével végzik el a műtétet. Arról, hogy az orvos lássa is azt, amit csinál, a bevezetett száloptikás kamerák gondoskodnak. A minimális beavatkozásnak hála csökken a kórházban töltendő idő, a fertőzések lehetősége, a műtét utáni fájdalom, a beteg gyorsabban visszatérhet a hétköznapi rutinjához. Az elvégezhető operációk tárháza ugyan korlátozott, de így is bőséges: sérv, epehólyag eltávolítás, vastagbéltumor eltávolítás, vakbélműtét, stb.
A számos előnyt látva akár elégedetten hátra is dőlhetnénk. Kicsit árnyalja azonban a képet, ha az orvos szemszögéből is megvizsgáljuk a dolgot. A száloptikás kamera biztosítja a megfelelő rálátást, viszont az orvos elveszíti a közvetlen kapcsolatot a „munkaterülettel”: a háromdimenziós valóság helyett egy kétdimenziós képernyőt kap, amely legyen bármilyen felbontású is, mégiscsak visszalépés. Ráadásul a képernyő nyilvánvaló módon nem a beteg hasán található, hanem valahol egy állványon. Ennek folyományaként az orvosnak máshová kell néznie, mint ahol dolgozik. Első hallásra ez nem tűnik olyan nehéznek, de aki játszott már mondjuk egy raliszimulátorral, az átérezheti a dolgot: nagyságrendekkel nehezebb úgy játszani, ha a képernyő nem egyenesen előttünk van, hanem egy irodai asztalnak megfelelően kicsit féloldalasan, a képzeletbeli autó tengelyétől erősen jobbra/balra. Ez sokat elvesz a természetesség érzéséből (gyerekkorunkban édesapán emiatt nem is barátkozott össze soha a ralis játékokkal, kormány és pedálok ide vagy oda...).

A fentieknél is nagyobb probléma – és sokkal inkább ellenkezik megszokásainkkal is –, hogy a lyukakon átvezetett karok inverz mozgatást igényelnek: ha az orvos jobbra akar mozdítani egy eszközt a hasüregben, akkor kezét balra kell mozgatnia. Elég egy hétköznapi tükör és néhány másodperc ahhoz, hogy átérezzük a helyzetet, a tét pedig valamivel nagyobb, mint egy rossz irányban elválasztott frizura lehetősége... A mozdulatok szabadsága ráadásul elég korlátozott, hiszen a bevezetett eszközök miatt a sebész elveszíti a karja legsokoldalúbban mozgatható része által biztosított szabadságot: a csuklói a hasüregen kívül maradnak. Ezen okok miatt a laparoszkópiás beavatkozások nagyon sok gyakorlást igényelnek. Elsajátításuk hosszú és nehézkes folyamat. Van tehát még hova fejlődni!
Ezt tartották szem előtt a Da Vinci robot fejlesztői is. Mielőtt rátérnénk a berendezés képességeinek taglalására, nézzük meg az alábbi rövid videót!
Ahogy látható, az orvos „elengedi” a bevezetett eszközöket, azokat egy robotberendezés kezébe adja, ő maga pedig megragadja a kontrollereket. A műtétet továbbra is az orvos végzi, a robot nem hoz önálló döntéseket, nem végez automatikus mozdulatokat, mindössze úgy és olyan helyekre ér el, ahová és ahogyan a sebésznek arra nincs lehetősége. A hagyományos laparoszkópiával szemben számtalan előnye van ennek az eszköznek. A legfontosabb talán, hogy a csukló visszakerül a hasfalon belülre, hála a kifinomult mechanikával rendelkező robotkaroknak (1:45-től látható). Sőt, ez a gépi csukló jobb az eredetinél is: nem csak szabadabban tud elfordulni, de kiszűri az emberi kéz eredendő remegését is.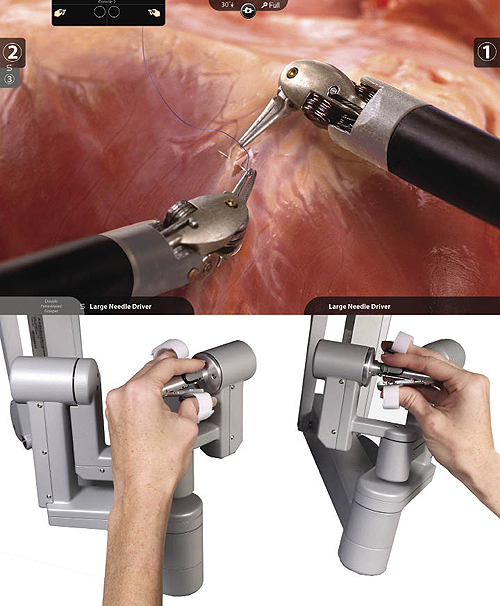 Az orvos a furcsa „pálcák” inverz mozgatása helyett természetes mozdulatokat végezhet, használhatja ujjait is, a mozdulatokat pedig egy speciális kontroller továbbítja a robothoz (1:00), melynek karjai könnyen, gyorsan, néhány mozdulattal cserélhetőek (az az asszisztensek feladata, akiknek a jelenléte a biztonság miatt is szükséges). További előnyt jelent, hogy a monitort leváltja egy igen részletes, háromdimenziós kijelző, fokozva a közvetlen, kézzel történő beavatkozással való hasonlóság érzetét (2:04-től ezt illusztrálják egy makett összevarrásának bemutatásával). Ez nagyban megkönnyíti a műtétet végző személy dolgát. Az már szinte csak extra – egy számítógépes rendszertől már-már elvárható, és az eddigiek után aligha okozhat meglepetést –, hogy a gépi karok érzékenysége szabályozható, vagyis különösen precíz mozdulatok szükségessége esetén állítható az, hogy az orvos kezének egységnyi elmozdulása mekkora elmozdulást eredményezzen a gépi kar esetében. Úgy is mondhatjuk, hogy egy folytonosan szabályozható sebességváltót is biztosít a rendszer, ami növeli az elérhető pontosságot.
Az orvos a furcsa „pálcák” inverz mozgatása helyett természetes mozdulatokat végezhet, használhatja ujjait is, a mozdulatokat pedig egy speciális kontroller továbbítja a robothoz (1:00), melynek karjai könnyen, gyorsan, néhány mozdulattal cserélhetőek (az az asszisztensek feladata, akiknek a jelenléte a biztonság miatt is szükséges). További előnyt jelent, hogy a monitort leváltja egy igen részletes, háromdimenziós kijelző, fokozva a közvetlen, kézzel történő beavatkozással való hasonlóság érzetét (2:04-től ezt illusztrálják egy makett összevarrásának bemutatásával). Ez nagyban megkönnyíti a műtétet végző személy dolgát. Az már szinte csak extra – egy számítógépes rendszertől már-már elvárható, és az eddigiek után aligha okozhat meglepetést –, hogy a gépi karok érzékenysége szabályozható, vagyis különösen precíz mozdulatok szükségessége esetén állítható az, hogy az orvos kezének egységnyi elmozdulása mekkora elmozdulást eredményezzen a gépi kar esetében. Úgy is mondhatjuk, hogy egy folytonosan szabályozható sebességváltót is biztosít a rendszer, ami növeli az elérhető pontosságot.  A Da Vinci jelenleg a sebészrobotok csúcsa, de korántsem jelenti faja számára az evolúció végét. Hátránya, hogy csak kis területeket érintő műtétek esetén alkalmazható. Ha több helyen kell hozzáférni a beteg belső szerveihez, akkor át kell szerelni az eszközt, új bemetszéseket kell ejteni. Ez nehéz, lassú és komplikált manőver. Amint arra Catherine Mohr a sebészet jövőjével foglalkozó alábbi előadásban rámutat, a továbblépést egy olyan megoldás jelentheti, melynek során az összes eszköz egyetlen csövön át hatol be a testbe, majd ezen csövön keresztül érkeznek be a flexibilis karok. Egy ilyen műszerrel sokkal több helyre lehetne elérni mindössze egyetlen bemetszést ejtve, kiküszöbölve ezzel az átszerelés okozta nehézségeket.
A Da Vinci jelenleg a sebészrobotok csúcsa, de korántsem jelenti faja számára az evolúció végét. Hátránya, hogy csak kis területeket érintő műtétek esetén alkalmazható. Ha több helyen kell hozzáférni a beteg belső szerveihez, akkor át kell szerelni az eszközt, új bemetszéseket kell ejteni. Ez nehéz, lassú és komplikált manőver. Amint arra Catherine Mohr a sebészet jövőjével foglalkozó alábbi előadásban rámutat, a továbblépést egy olyan megoldás jelentheti, melynek során az összes eszköz egyetlen csövön át hatol be a testbe, majd ezen csövön keresztül érkeznek be a flexibilis karok. Egy ilyen műszerrel sokkal több helyre lehetne elérni mindössze egyetlen bemetszést ejtve, kiküszöbölve ezzel az átszerelés okozta nehézségeket.
Biztosak lehetünk benne, hogy még sokat fogunk hallani életünk során a sebészeti technikák fejlődéséről, és akik kevésbé szerencsések közülünk, azok talán személyesen is összefuthatnak ezekkel az eszközökkel. Hogy ez mennyire nem a távoli jövő, azt jól jelzi a Catherine által felemlegetett adat: ha valakin mostanában prosztata műtétet hajtottak végre az USA-ban, akkor a szike jó eséllyel már egy Da Vinci kezében volt... Elsőre talán ijesztő lehet mindez, de ha higgadtan végiggondoljuk, akkor nincs okunk tartani az újdonságtól: ahogy a leírásban is igyekeztünk érzékeltetni, az orvos a robot révén olyan képességek és kényelem birtokába juthat, mely csak növelheti a biztonságot és a műtét pontosságát.
|
Források |