Tanulékony zsonglőr robotok
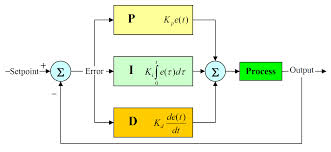
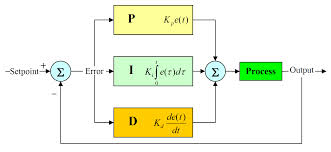 Be kell valljam, az irányítástechnika nem tartozott a kedvenc tantárgyaim közé annak idején. Éreztük, hogy ez egy fontos dolog, és próbáltuk mindezt tudatosítani magunkban a péntek délutáni előadásokon, de végül a lényeg valahogy elveszett az integrálok sűrűjében valahol a PID szabályozók fenyegetően tornyosuló hegyén túl. Mindez nagy hiba, hiszen robotokkal és egyéb, különböző önállóan mozgatott alkatrészekkel rendelkező gépekkel teli világunkban kulcsfontosságú szerepet játszik ez a tudományág, így nagyon fontos, hogy a felnövekvő mérnök hallgatók figyelmét jobban sikerüljön megragadni az ezzel foglalkozó kurzusokon, mint annak idején az én évfolyamomét. Raffaello D'Andrea régi ismerőseinket, a szinte már hétköznapi jelenségnek számító quadrotorok egy különösen ügyessé tett csoportját hívja segítségül előadásában ahhoz, hogy igazán látványosan illusztrálja mire is képesek a legújabb algoritmusok! Tovább után egy roppant szórakoztató videó következik (magyar felirattal) nem csak jövendő mérnököknek!
Be kell valljam, az irányítástechnika nem tartozott a kedvenc tantárgyaim közé annak idején. Éreztük, hogy ez egy fontos dolog, és próbáltuk mindezt tudatosítani magunkban a péntek délutáni előadásokon, de végül a lényeg valahogy elveszett az integrálok sűrűjében valahol a PID szabályozók fenyegetően tornyosuló hegyén túl. Mindez nagy hiba, hiszen robotokkal és egyéb, különböző önállóan mozgatott alkatrészekkel rendelkező gépekkel teli világunkban kulcsfontosságú szerepet játszik ez a tudományág, így nagyon fontos, hogy a felnövekvő mérnök hallgatók figyelmét jobban sikerüljön megragadni az ezzel foglalkozó kurzusokon, mint annak idején az én évfolyamomét. Raffaello D'Andrea régi ismerőseinket, a szinte már hétköznapi jelenségnek számító quadrotorok egy különösen ügyessé tett csoportját hívja segítségül előadásában ahhoz, hogy igazán látványosan illusztrálja mire is képesek a legújabb algoritmusok! Tovább után egy roppant szórakoztató videó következik (magyar felirattal) nem csak jövendő mérnököknek!
Az előadást nem a TED videókban megszokott színpadon, hanem egy speciális teremben vették fel. A szobát különböző kamerák és szenzorok vigyázó szemei pásztázták, ezzel létrehozva egy lokális pozíció meghatározó rendszert, amely pontosan meg tudta adni a repülő eszközök helyzetét a vezérlő számítógépnek. A quadrotorokat különböző feladatokra hangolt algoritmusokkal vezérelték, melyek másodpercenként 50-szer értékelték és számították ki a mozgás paramétereit, szabályozták a kívánt céloknak megfelelően a rotorok sebességét. Érdemes egy picit megállni ennél a számnál, és végiggondolni mit is jelent ez: mindösszesen 0,02 másodperc alatt a számítógép megkapja és értékeli a kamerákból érkező jelet, kiszámítja a legutóbbi adatok segítségével a gép mozgását, majd összehasonlítja ezt az elvárt feladat elvégzése által megkívánt elméleti értékekkel és ennek megfelelően utasítást ad a 4 rotor sebességeinek korrigálására. Figyelemreméltó teljesítmény, főleg ha elmorfondírozunk azon, hogy mire vagyunk képesek ugyanennyi idő alatt.
De lássuk, hogy mit lehet megtanítani a gépeknek ezen algoritmusok segítségével! Többek közt az egyensúlyozás művészetét. A videón látható egy részlet, amikor a quadrotor játszi könnyedséggel, a legkisebb kitérés nélkül egyensúlyban tart egy tekintélyes hosszúságú pálcát, sőt, elkezd vele ide-oda röpködni is a szobában. Az egyensúlyozás egy alapvető képesség, és bár ebben a formában egy látványos bűvésztrükk érzetét kelti csak csupán, az embereket szállító repülő eszközök esetében ennél életbevágóbb formában nyilvánul meg ezen képesség hasznossága. Egy modern vadászgép ugyanis olyannyira a saját stabilitása határain repül, hogy ha hirtelen lekapcsolna a stabilizációért felelős elektronika, akkor nincs az a pilóta, aki megtartaná a képletesen szólva „talajt vesztett” gépet.

Ez az attrakció azonban csak bevezető a későbbiekhez. Láthatjuk a robotokat eldobott labdát visszaütni vagy éppen többük által kifeszített hálóval elkapni azt és szaltókat repülni is. Ezen mutatványok érdekessége, hogy a gép a saját kísérleteiből tanul az erre lehetőséget adó algoritmusok segítségével, és a korábbi tapasztalataiból kiindulva egy igazi atlétához hasonlóan egyre jobban és jobban hajtja végre a feladatokat. Felületesen nézve megdől az a kép, miszerint egy gép csak azt tudja elvégezni, amire utasítást kap tőlünk, holott valójában arról van szó, hogy képesek vagyunk már olyan algoritmusok megalkotására, melyek az adott keretek közt hajlandóak tanulni és állítani saját paramétereiket! Egészen új dimenziókat nyit mindez a gépeinkkel való kommunikáció és együttélés terén.
Nem is szaporítanánk tovább a szót, hiszen itt a videó, ami sokkal szemléletesebb a leírtaknál, és a megemlítetteken kívül jó pár meglepetést tartogat még, többszörösen aláhúzva az üzenetet: az irányítástechnika nem csak nélkülözhetetlen, de igen érdekes is tud lenni.